Kanga
Usually when one thinks of a kangaroo, one imagines them bounding around the Australian outback. However, kangaroos also get around another way, by walking. While walking, their body motion classifies them as the only known pentapods - using five limbs to get around. A kangaroo's front legs, back legs, and tail work together to propel them forwards. Inspired by this motion, my team and I worked to design and build a robot that would mimic this unique motion, from here on referred to as Karen.
Karen's leg motion had to mimic the timing of a real kangaroo, which was characterized by O'Connor et. al and shown in the diagram below. The tail works to provide stability while the hind legs walk forward.

Central to our design was the use of two types of four-bar linkages modeled after Hoeken's linkage. This was to keep the contact point (Karen's foot) in contact with the ground for as long as possible, and keep the return path quick.
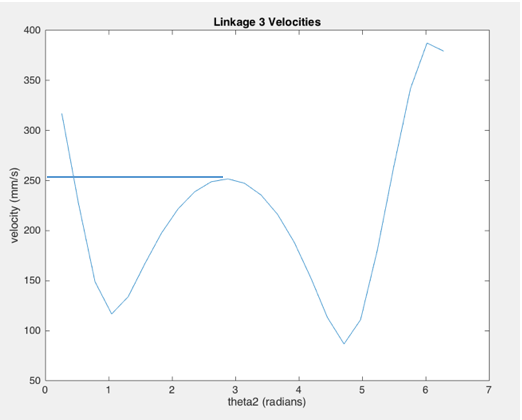
In addition to developing our linkages, we performed analyses of coupler velocities in Matlab, characterized our motor to determine the optimal and necessary running voltage, and manufactured Karen. "Highlight photos" are included below, as well as the full technical report.